concept art.
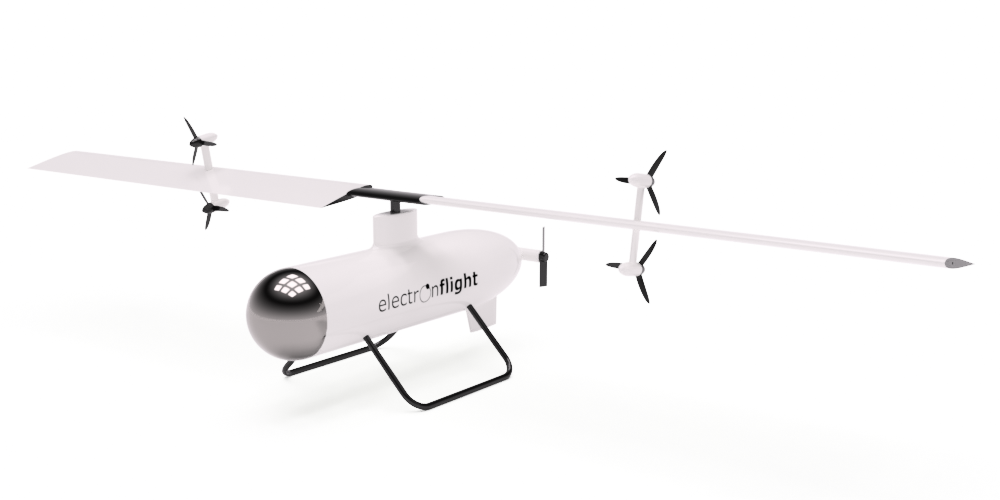
Drone concept...
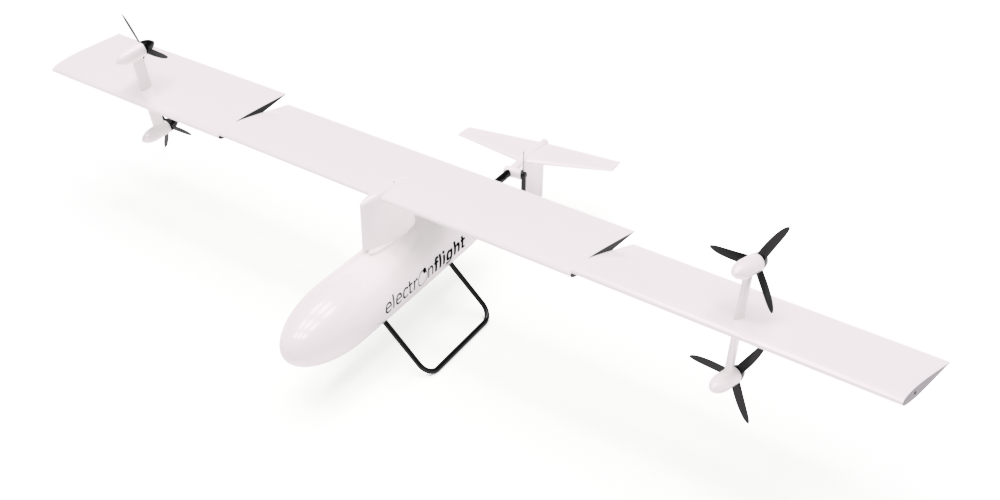
Transitioning concept...
The pivotwing concept is a new take on a decades old idea, the self driven rotor. Electric motors drive rotary wings while also providing independent pitch control to each wing. The result is a lightweight and efficient rotary wing aircraft that has full collective and cyclic pitch control with an absolute minimum of moving parts.
Slip rings are an option, but not required. The main battery that powers the electric motors can rotate with the hub, either internally or externally. This eliminates the risk, cost and maintenance of using slip rings to transmit power to the hub and the electric motors. The pivoting wings are mechanically limited and are not required to make complete revolutions. This again eliminates the need to use slip rings.
Wings are pivoted through differential thrust. Servos able to handle the rigors of actuating once per cycle would be expensive, bulky, heavy and slow but most of all they would eventually fail. By using differential thrust to pivot each wing individually, all the usual problems associated with actuators can be completely eliminated.
It may be possible to build a version which is able to transition into forward, fixed wing flight. In one embodiment the aircraft would lose altitude until both wings are aligned and pointed downward. The symmetrical airfoils have no pitching tendencies and naturally orient themselves into the relative wind. A passive horizontal stabilizer also orients itself into relative wind during descent.
Once the wings are aligned, the aircraft is ready to enter fixed wing flight. The wings both pull up and recover from the dive. To re-enter vertical flight the process is reversed. The aircraft would again lose altitude until the wings are aligned. The wings would then pull up to recover from the dive, this time in opposite directions causing the aircraft to enter rotary wing flight once again.
Drone concept...
Transitioning concept...
Join. Collaborate. Invest.
Electron Flight LLC 3728 Autumn Lane Baytown, Texas 77521USA
Email | info@electronflight.com
Text | 909.240.8424
Twitter | @ElectronFlight
© 2023 all rights reserved | patents pending